
Vivek Singh
Genius Bro!
+91-8384050783
www.geniusbro.org
General information
Brief information on the project
The Deutsche Gesellschaft fur Internationale Zusammenarbeit (GIZ) GmbH is an international cooperation enterprise for sustainable development with worldwide operations. An SFF has been granted by the Federal German Ministry of Economic Cooperation and Development (BMZ) for smart and local solutions for the production of products for COVID 19. The goal of the proposed intervention is ‘to identify, support, and handhold innovations that promote smart and local solutions in the production of equipment required for Covid 19.
Context
COVID-19 pandemic has made a huge impact on the Global Economy. Micro, Small, and Medium Enterprises (MSME) and start-ups are struggling to do business in lockdown mode. Industries are facing challenges in employee transportation, hygiene and safety at the workplace, cost-cutting for production, and many other areas. Taking this pandemic situation as an opportunity many new start-ups have developed simple digital solutions, automation in the supply chain, contactless delivery, guidance on financial problems, and many other innovative products to serve the market demand and support the whole society to address the covid-19 challenges.
Aspiring Entrepreneurs are taking these challenges as a new opportunity and coming with innovative solutions like low-cost locally developed technologies ventilators, personal protective equipment for health workers and many such innovations that have given a ray of hope to fight this pandemic. The current situation needs new innovative solutions in almost all sectors including hospitals, pharma, retail, food supply chain, public transport, education, IT operations, etc. Many innovative ideas have been scaled up into successful start-ups through our incubator partners.
During the onset of the pandemic, the medical staff worked round the clock to control the spread of the COVID 19 virus this led to a shortage of staff as well at times since many medical workers lost their lives to save the lives of people and the situation still is far towards becoming normal. At the moment what we require is a technology that can act as an additional supporting hand to the medical workers and the paramedic staff, in this regard GIZ intends to engage with a consultant that has taken the challenge to develop a robot created for the task of picking up medicines, kept ready through a physical/digital dispensing station, and delivering to the correct digitally enabled patient location, this will help solve the problem of delivering medicines to patients. The support of the robot for delivering medicines to patients will minimize human contact as well as contains the virus. Also at times when a doctor is sitting at a remote place a doctor can prescribe medicine to a patient by accessing his case history through the program technology in the robot. This technology can help to minimize human contact with patients as well as contain the spread of the virus and other dangerous diseases.
The solution propounded by the Genius Bro for the Covid-19 related issues being faced in the hospitality sector, esp. The medical institutes, hospitals, and covid-19 patient camps, was identified as one of the potential innovations that could help serve the medicines to the patients using robots and eliminate the need for a human attendant, thus minimizing the risk to healthy people.
Project: My Medicine Robot - A medicine Delivery Robot
A set of fully autonomous robots to be deployed in a contagious environment that could fetch medicine and deliver it to the patients who have contracted a contagious disease, radiation sickness, etc.
About Genius Bro!
Genius bro! Provides E-Learning services, Consultancy in Education. And 21st-century skills to be inculcated in the students like Robotics, Coding (Hardware and Software), Artificial Intelligence, CAD Designing, and 3-printing, Augmented Reality, Virtual Reality, 3D Game Development, and Android App development.
The founder of the company has a keen interest in robotics and has been developing and deploying easy-to-learn Robotics kits for his students. The startup is working passionately to device special application/purpose robots to help improve humans in doing mundane and risky tasks.
Overview of the project:
Problem Statement:
Need to develop a set of robots that could fetch medicine and deliver it to the patients who have contracted a contagious disease or radiation sickness.
Constraints:
● Individual Robot must cost less than Rs. 50,000/-
● Should be able to pick medicines from the service counter
● Should be able to self-navigate and avoid obstacles.
● Deliver medicine to the respective patient only
● Easy to deploy in healthy human restricted entry areas such as COVID-19 wards
Defining the problem for development:
The problem was divided into the following 3 modules to better understand it and milestones were set to derive the most appropriate and feasible solution:
● Environment
● Robot Design
● Backend Software: IoT and cloud computing integration
Environment:
● Hospital wards/rooms with preferably medium to large bed capacities
● Medicine dispensing unit/area (Nurse station or desk)
● Inflow and outflow of people including Doctors, Nurses, ward boys, sweepers, patients, and related paraphernalia.
● Changing bed and equipment locations.
● Obstacles like slippers, shoes, pots, tubs, tables, etc.
Robot (Features):
● Autonomous-cloud connected robot (a set of robots) that could map the whole ward and accurately identify and assign the posts (Dispensing area, Patient beds/tables)
● Big enough to support the weight of the medicines (sometimes syrups and water glass/vessel) and safely transport it from one point to another without toppling itself, dropping, or spilling the medicine
● Extensible: Should be able to reach the tabletop or hand-deliver it to the patient
● Equipped with mechanical appendages to hold trays, water glass, and syrup bottles
● Scope: could deliver I.V. solution bottles (Glucose etc.) to the wards and OTs
● Sensors: Camera (Computer Vision), LiDAR (mapping), UltraSonic/RADAR (Object detection), Bluetooth and Wifi (Intranet and communication), and LoRa WAN beacon (IoT)
Software:
● Image stitching with robot’s movements-log integration to produce a holistic map of the ward or area of operation, identify dispensing hub and delivery destination(s), and cope with changing environmental factors (change of bed position, etc.)
● Should integrate with the Hospital’s CRM or another prescription system (already being used or bespoke) to fetch medication routine/schedules of the patient.
● Auto-Wakeup, autonomous navigation, object detection & avoidance, course- correction, auto return to the charging bay, and manual override
● Camera feed recording, activity Logs generation and upload, Audio output to speak directly to the patient or deliver some piece of information/instruction
Use cases:
The following use cases were taken for the development of the integrated robot system
1. Use-Case 1
● Environment:
A well-defined hospital setup with distinct ward(s) to house contagious patients, such as covid-19 wards. Most of the elements remain stationary at the designated areas only.
● Procedure:
Clearly defined Medicine dispensing hub where the nurse sets up trays filled with the prescribed medication schedule > The robot picks up the tray pertaining to the patient that needs medicine at that time, delivers it, and returns to its charging bay. The cycle is repeated for other patients also.
● Note:
The robot need not identify and decide what all medicines are to be picked. The liability is of the nurse/ward boy stationed at the dispensing desk.
2. Use-Case 2
● Environment:
Small hospital setup with internal-medicine shop/repository and open
wards,on the same floor (no lifts involved)
● Procedure:
The robot goes to the central medical store and collects the medicine > traverses through the corridors and atrium> delivers the medicine.
● Constraints:
The robot needs to be sanitized every now and then in order to protect
other healthy humans during its travel. A safety mechanism/enclosure will be required to safeguard the medicines it is carrying and also to prevent any minified intrusions.
● Note:
This is a typical scenario of govt. and other small-medium room-sized hospitals. The environment is usually rapidly changing so the system should be advanced enough to assess the changes and navigate accordingly.
3. Use-Case 3
● Environment:
Hospital OTs with limited staff
● Procedure:
the robot serves as the ward boy to deliver equipment, fluids, other paraphernalia before, during, and after the operation/surgery
● Constraints:
Quick to navigate between the pickup and delivery points. Should manage to self navigate as there will be a lot of obstructions. Sanitization of its body will be required. Should be trackable with sound and alert systems.
● Note:
The form factor required may be different as it might have to carry a bigger and heavier payload. Must work in conjunction with hospital staff.
4. Use-Case 4
● Environment:
House set-up for elderly Care
● Form:
Compact robot with limited articulated appendages, and a better camera to monitor the movements and activities of the target elderly person.
● Procedure:
Serve as an assistant with medication (and food) reminders, track anomalous behavior, and raise alerts.
● Note:
The built-in camera and screen could help the elderly feel connected to their family/friends. On-board Alexa/Google- assistance could render an elderly person communicate better with voice/gesture commands and will capture their requirements.
The Outcome: Prototype
Upon deriving the most common factors that would influence the design of the robots like freezing the most common environment of operation, the must-have feature to enable the robot to deliver medicines autonomously, the prototype development started.
A 3 wheeled tadpole design was chosen for the powertrain, where the 2 parallel wheels are powered by 12V BLDC heavy-duty compact motors, and a castor wheel to support the weight and improved maneuverability of the robot.
The dimensions of the base were set to 30cm x 25cm x 15cm (L x B x H) with a vertical beam/rod of metal affixed to the base plate extending 75cm vertically up. A tray of 20cm x 18cm x 2cm is attached to the top end of the rod. The volume between the lower part of the tray and the top of the base is left empty in order to reduce weight and lower the total surface area and thus prevent the chances of contamination as the Covid-19 viruses tend to cling onto surfaces, hence lower surface area reduces the risk of contamination multi-folds.
Technology:
Primary the robotic mobility and navigation were developed on SLAM methodology (Simultaneous Localization and Mapping):
SLAM (simultaneous localization and mapping) is a method used for autonomous vehicles that lets one build a map and localize the vehicle in that map at the same time. SLAM algorithms allow the vehicle to map out unknown environments. The map information is used to carry out tasks such as path planning and obstacle avoidance.

Major Components and specifications
● Raspberry Pi4
● Lidar sensor
● Encoder Motors
● Micro Controllers Arduino Family
Operating System: Ubuntu
Middleware: Ros (Robot Operating System)
Base Controller
Ros navigation stack drives the robot by publishing velocity command to /cmd_vel topic using geometry /twist message. The base controller receives the ‘twist’ message through Ros serial python and translates the velocities to motor commands.

Odometry
Odometry information is used to estimate the robot’s position relative to its origin, Linear and angular velocity are found in odometry data

Laser Sensor:
To achieve full autonomy, a navigation stack requires a robot to have at least one source of laser information to perceive the robot’s information and avoid obstacles along its way. The LiDAR was used here to map the environment.
TF:
TF is the Ros way of determining the location and relationship of the robot between coordinate frames
Creating a map:-
The robot is moved slowly in the locality so as to create the map for an unknown environment and it is then saved in the Map server.
Navigation Autonomously:-
The navigation stack needs to be aware of the robot size when it plans the path. This is to make sure that the robot has enough clearance and does not collide with any obstacle as it follows the planned path. ACML node helps in meeting the above requirement.

Electronics laden chassis (base) of the robot




SLAM Problem
A map needed for localization
Pose estimate needed for mapping {diagram}



Mapping JSS-Geniusbro room
MATHEMATICAL MODELLING OF SLAM ROBOT
Robot’s Controls
U1:T = {U₁,U₂,U₃--------------Uₜ}
Observation
Z1:T = { Z1, Z2, Z3, -----------Zt}
- Map of the environment:- m
- Path of the robot
X0:T = { X0, X1, X2----------XT}
Probabilistic approach

● Uncertainty in robot’s position and observation
● Using Probability theory to explicitly uncertainty
In probabilistic terms
Estimate the robot‘s path and map
P(X0:T, m | Z1:T, U1:T )
where :
P = distribution
X= path
m=map
Z = observation
U= Controls
Graphical Model

Standard odometry models.
Robot moves from
X1, Y1, θ1 to X2, Y2, θ2
δtrans = this-at (
δrot1 = atan2(Y2-Y1, X2-X1) - θ1
δrot2 = θ2-θ1-δrot1

1.Robot path and map are unknown
2.Map and pose estimates are correlated
3.Mapping b/w observation and map is unknown
4. Picking up wrong data can have catastrophic Consequences
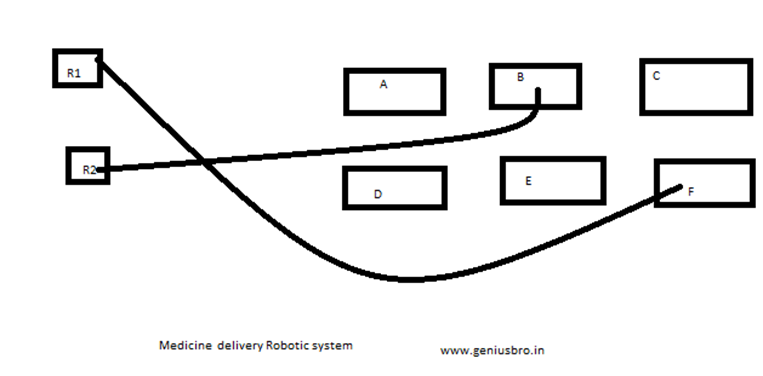
Showing tasks assigned to robots R1 and R2.
R1, R2: Robots | A, B, C, D, E, & F: Patient beds
Tasks achieved:
Development of idea into prototype/product
Pilot testing & developing go to market strategy
Video of the prototype:
Acknowledgment
Genius Bro takes this opportunity to thank Gesellschaft für Internationale Zusammenarbeit (GIZ) GmbH represented by German Development Cooperation and its officials for selecting our solution and providing support in conducting the study with the objective of developing the technology for wider market use.

#robot #robotics #robots #technology #art #engineering #arduino #electronics #d #mecha #tech #transformers #anime #gundam #robotic #scifi #toys #ai #drawing #digitalart #electrical #diy #innovation #illustration #design #automation #bandai #arduinoproject #artificialintelligence #bhfyp
#iot #future #electronic #gunpla #toyphotography #cyberpunk #toy #lego #engineer #artist #science #cyborg #s #manga #japan #coding #programming #raspberrypi #microcontroller #arduinouno #actionfigures #photography #mech #android #artwork #sensor #project #robotart #stem #machine
#slam #deathmetal #metal #basketball #deathcore #nba #brutaldeathmetal #dunk #ballislife #music #slammingbrutaldeathmetal #metalhead #metalcore #blackmetal #slamdunk #hardcore #grindcore #poetry #heavymetal #art #brutal #overtime #lebronjames #beatdown #death #rap #hoops #k #slamming #bhfyp

Comments